Sistema GPS: ± 10 mm de precisión
Il sistema GPS (Global Position System) nació en 1973 en USA; en 2000 el gobierno americano liberalizó el sistema para usos civiles. Para hacer esto se colocó en el espacio una red de 31 satélites artificiales, que giran alrededor de la tierra a alturas diversas, los cuales transmiten su posición a todos los receptores GPS. El receptor GPS capta las señales de los satélites que dan la posición horizontal del receptor en la tierra (longitud y latitud).
En los últimos años se ha obtenido, a través de softwares dedicados a ello, una elevada precisión, alrededor de ± 10 mm, también en la elevación (en la indicación de la posición vertical), gracias al sistema RTK (Real Time Kinematic), que da la posición en tiempo real y la frecuencia elevada de las señales emitidas (unos 10 hertz).
Descubre el funcionamiento y los componentes del sistema GPS
Las máquinas MARA funcionan también con los sistemas GPS y son compatibles con todos los sistemas GPS en comercio. El funcionamiento de las niveladoras MARA GPS es igual al de los sistemas láser, a excepción del hecho de que la altura de referencia la da directamente el GPS. El sistema GPS puede ser utilizado para crear un plano horizontal, con 1 o 2 pendientes, con pendientes variables o con pendientes programadas a través de un software. Las niveladoras MARA, controladas por el sistema GPS, reciben las señales que definen el plano de los satélites y lo copian a tierra. La precisión que se obtiene con esta tecnología con respecto al láser se debe a la menor precisión intrínseca de los sistemas GPS, sujeta también a variaciones periódicas unidas al cambio de constelación de los satélites cada 12,5 minutos. El sistema GPS ofrece, contrariamente, una gran flexibilidad de empleo, en particular modo en terrenos de grandes dimensiones con pendientes diversas, y se utiliza también en otros tipos de trabajos bien sea en campo agrícola, bien sea en construcción civil o en grandes movimientos de tierra.
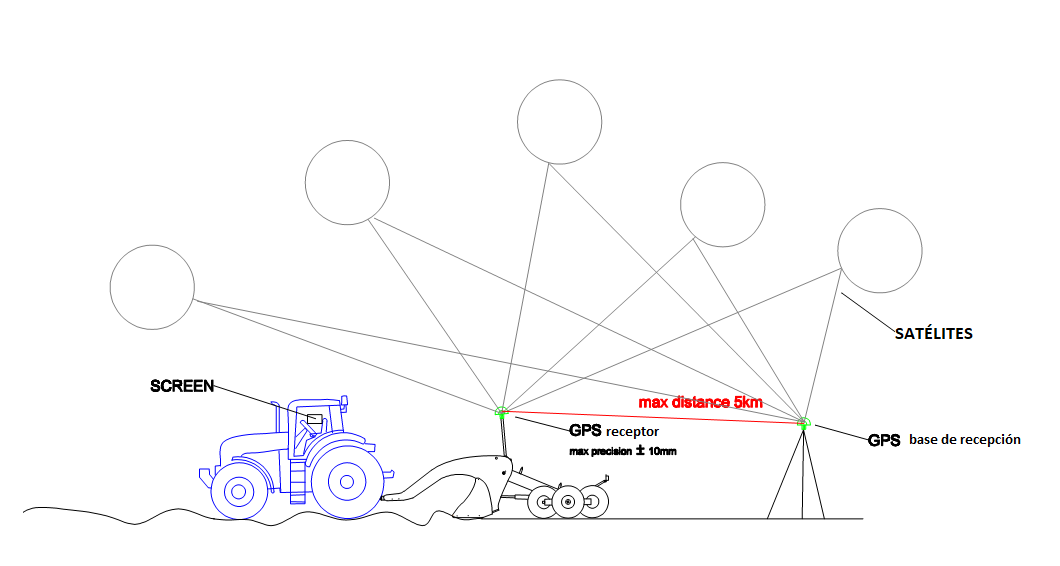
El sistema GPS está dotado de un receptor (base móvil) colocado en la niveladora que va en el campo, y de un receptor fijo (base estática) como referencia en diferencial, la que define la diferencia de desplazamiento entre la estación móvil y la fija. En la cabina, al lado del operador, se posiciona una pantalla (pc embedded – pc industrial) que elabora los datos emitidos por el receptor móvil (via cavo) y por el receptor fijo (via radio) y manda un mando electrohidráulico que controla la altura de la cuchilla, consintiéndole ejecutar el plano en el terreno. Esto permite tener una precisión de posición horizontal y vertical alrededor del centímetro, a una distancia máxima de 5 km entre los dos receptores. Contra más aumente la distancia entre los dos receptores, más de 5 km, menor será la precisión.